
- PROFIBUS电缆:电缆型号有多种,其中基本的是PROFIBUS FC(Fast Connect快速连接)Standard电缆(订货号6XV1 830-0EH10)
- PROFIBUS网络连接器:网络连接器也有多种形式,如出线角度不同等等
- 本地CPU通信区域不包括 I、Q、M 或 V。
- 本地CPU不足以提供请求的数据长度。
- 对于 GET指令数据长度为零或大于 222 字节;对于 PUT指令数据长度大于 212 字节。
- 远程CPU通信区域不包括 I、Q、M 或 V。
- 远程CPU 的IP 地址是非法的 (0.0.0.0)。
- 远程CPU 的IP 地址为广播地址或组播地址。
- 远程CPU 的IP 地址与本地 CPU的IP 地址相同
- 远程CPU 的IP 地址位于不同的子网。
- 请求或发送的数据过多。
- STOP 模式下不允许对 Q 存储器执行写入操作。
- 存储区处于写保护状态
- 远程 CPU 无可用的被动连接资源(S7-200 SMART CPU被动连接资源数为 8 个)。
- 与远程 CPU 之间的连接丢失(远程 CPU 断电或者物理断开)。
- 调用 PUT/GET 指令的CPU 占用主动连接资源数;相应的远程 CPU 占用被动连接资源。
- S7-200 SMART CPU 程序中可以包含远多于 8个PUT/GET 指令的调用,但是在同一时刻多只能激活 8 个 PUT/GET 连接资源。
- 同一时刻对同一个远程 CPU 的多个 PUT/GET 指令的调用,只会占用本地 CPU的一个主动连接资源和远程 CPU的一个被动连接资源。本地 CPU 与远程 CPU之间只会建立一条连接通道,同一时刻触发的多个 PUT/GET 指令将会在这条连接通道上顺序执行。
- 同一时刻多能对8个不同 IP 地址的远程 CPU 进行 PUT/GET 指令的调用,第9个 远程CPU的PUT/GET 指令调用将报错,无可用连接资源。已经成功建立的连接将被保持,直到远程 CPU断电或者物理断开。
- S7-200 SMART CPU 调用 PU西门子6ES75101DJ010AB0T/GET 指令,执行主动连接的同时也可以被动地被其他远程 CPU 进行通信读写。
- S7-200 SMART多可以与被8个不同 IP 地址的远程 CPU 进行 建立被动连接。已经成功建立的连接将被保持,直到远程 CPU断电或者物理断开。
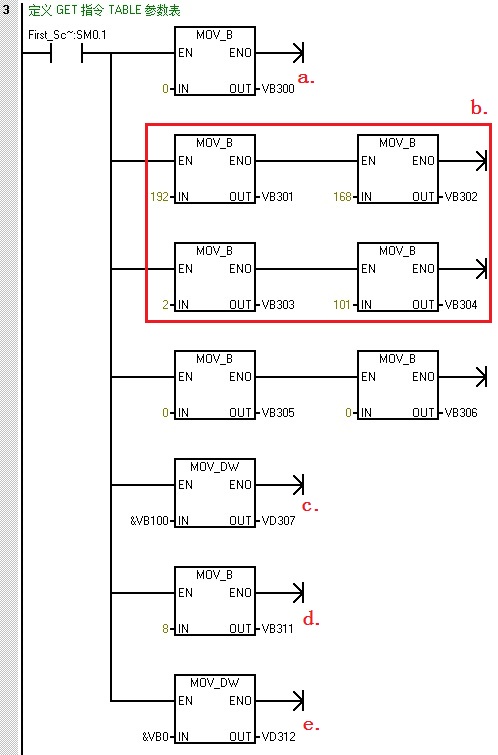
- a.定义通信状态字节
- b.定义 CPU2 IP 地址
- c.定义 CPU2 的通信区域 ,从 VB0 地址开始
- d.定义通信数据长度
- e.定义 CPU1 的通信区域,从 VB100 地址开始
西门子模块6ES7516-3AN01-0AB0
Profibus 接线
无论是组成MPI还是RPOFIBUS-DP网络,用到的主要部件都是一样的:
 具体电缆及接头订货号请参看:常用附件订货号
具体电缆及接头订货号请参看:常用附件订货号
连接网络连接器
A. 电缆和剥线器。使用FC技术不用剥出裸露的铜线。

图1. 剥好一端的PROFIBUS电缆与快速剥线器(FCS,订货号6GK1905-6AA00)。
B. 打开PROFIBUS网络连接器。首先打开电缆张力释放压块,然后掀开芯线锁。

图2. 打开的PROFIBUS连接器
C. 去除PROFIBUS电缆芯线外的保护层,将芯线按照相应的颜色标记插入芯线锁,再把锁块用力压下,使内部导体接触。应注意使电缆剥出的屏蔽层与屏蔽连接压片接触。

CPU不需要进行通信编程。PUT/GET 指令中TABLE 参数用于定义远程CPU的 IP地址、本地CPU和远程 CPU的数据区域以及通信长度(TABLE 参数定义见 表 2)。
表 1 PUT和GET 指令:
|
LAD/FBD |
STL |
描述 |
|
|
PUT TABLE |
PUT 指令启动以太网端口上的通信操作,将数据写入远程设备。PUT 指令可向远程设备写入多 212 个字节的数据。 |
|
|
GET TABLE |
GET 指令启动以太网端口上的通信操作,从远程设备获取数据。GET 指令可从远程设备读取多 222 个字节的数据。 |


表 2 PUT和GET 指令的TABLE参数定义:
|
字节偏移量 |
Bit 7 |
Bit 6 |
Bit 5 |
Bit 4 |
Bit 3 |
Bit 2 |
Bit 1 |
Bit 0 |
|
0 |
D1 |
A2 |
E3 |
0 |
错误代码4 |
|||
|
1 |
远程 CPU的 IP地址 |
|||||||
|
2 |
||||||||
|
3 |
||||||||
|
4 |
||||||||
|
5 |
预留(必须设置为0) |
|||||||
|
6 |
预留(必须设置为0) |
|||||||
|
7 |
指向远程 CPU 通信数据区域的地址指针 |
|||||||
|
8 |
||||||||
|
9 |
||||||||
|
10 |
||||||||
|
11 |
通信数据长度5 |
|||||||
|
12 |
指向本地 CPU 通信数据区域的地址指针 |
|||||||
|
13 |
||||||||
|
14 |
||||||||
|
15 |
||||||||
1 D :通信完成标志位,通信已经成功完成或者通信发生错误。
2 A :通信已经激活标志位。
3 E :通信发生错误,错误原因需要查询 错误代码4。
4 错误代码 :见表 3 PUT 和 GET 指令TABLE 参数的错误代码。
5 通信数据长度 :需要访问远程 CPU通信数据的字节个数,PUT 指令可向远程设备写入多 212 个字节的数据,GET 指令可从远程设备读取多 222 个字节的数据。
表 3 PUT 和 GET 指令TABLE 参数的错误代码:
|
错误代码 |
描述 |
|
0 |
通信无错误 |
|
1 |
PUT/GET TABLE参数表中存在非法参数:
|
|
2 |
同一时刻处于激活状态的 PUT/GET 指令过多(仅允许 16 个) |
|
3 |
无可以连接资源,当前所有的连接都在处理未完成的数据请求(S7-200 SAMRT CPU主动连接资源数为 8 个)。 |
|
4 |
从远程 CPU 返回的错误:
|
|
5 |
与远程 CPU 之间无可用连接:
|
|
6-9 |
预留 |
通信资源数量
S7-200 SMART CPU 以太网端口含有 8 个PUT/GET 主动连接资源和 8 个PUT/GET 被动连接资源。例如:CPU1 调用 PUT/GET 指令与 CPU2 ~ CPU9 建立8主动连接的同时,可以与 CPU10 ~ CPU17 建立8被动连接(CPU10 ~ CPU17 调用 PUT/GET 指令),这样的话 CPU1 可以同时与16台 CPU(CPU2 ~ CPU17)建立连接。关于主动连接资源和被动连接资源的详细解释如下:
1、主动连接资源和被动连接资源
2、8 个PUT/GET 主动连接资源
3、8 个PUT/GET 被动连接资源
指令编程举例
在下面的例子中,CPU1 为主动端,其 IP 地址为192.168.2.100,调用 PUT/GET 指令;CPU2 为被动端,其 IP 地址为192.168.2.101,不需调用 PUT/GET 指令,网络配置见图 1 。通信任务是把 CPU1 的实时时钟信息写入 CPU2 中,把CPU2 中的实时时钟信息读写到 CPU1 中。
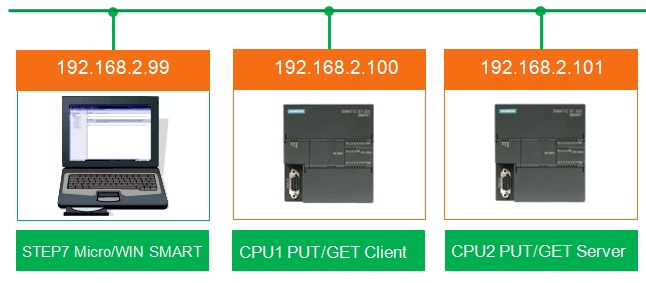
图 1 CPU通信网络配置图
1、CPU1 主动端编程
CPU1 主程序中包含读取 CPU 实时时钟、初始化 PUT/ GET 指令的 TABLE 参数表、调用 PUT 指令和 GET 指令等。
网络1:读取 CPU1 实时时钟,存储到 VB100 ~ VB107 。
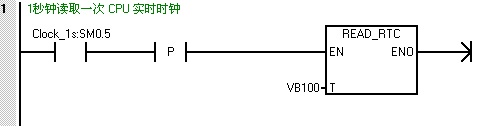
图 2 读取 CPU1 实时时钟
 注:READ_RTC 指令用于读取 CPU 实时时钟指令,并将其存储到从字节地址 T 开始的 8 字节时间缓冲区中,数据格式为 BCD 码。
注:READ_RTC 指令用于读取 CPU 实时时钟指令,并将其存储到从字节地址 T 开始的 8 字节时间缓冲区中,数据格式为 BCD 码。
网络2:定义 PUT 指令 TABLE 参数表,用于将 CPU1 的VB100 ~ VB107 传输到远程 CPU2 的VB0 ~ VB7。
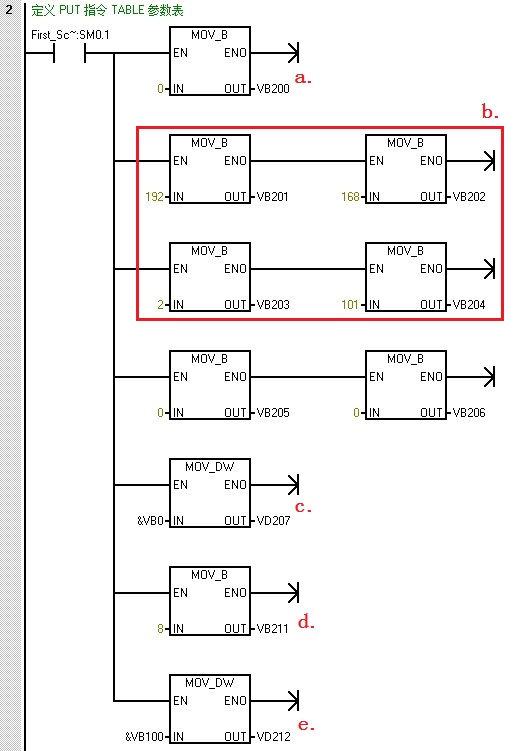
图 3 定义 PUT 指令 TABLE 参数表
网络3:定义 GET 指令 TABLE 参数表,用于将远程 CPU2 的VB100 ~ VB107 读取到 CPU1 的 VB0 ~ VB7。
西门子模块6ES7516-3AN01-0AB0
装置 SITOP电源电线电缆数控备件伺服电机等工控产品,我们公司在价格上有较大优势,更注重售后服务,现有大量现货销售,欢迎您。
这些功能码是对四个数据区位输入、位输出、寄存器输入、寄存器输出进行访问的,如图 4 所示。
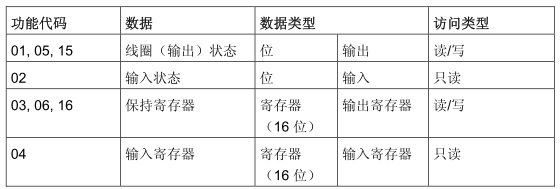
图4 访问的数据区
Modbus地址由起始的数据类型代号和地址偏移量组成。功能码决定对Modbus地址进行操作类型,其可根据需要传输的数据类型和个数来决定,如图 5 所示。
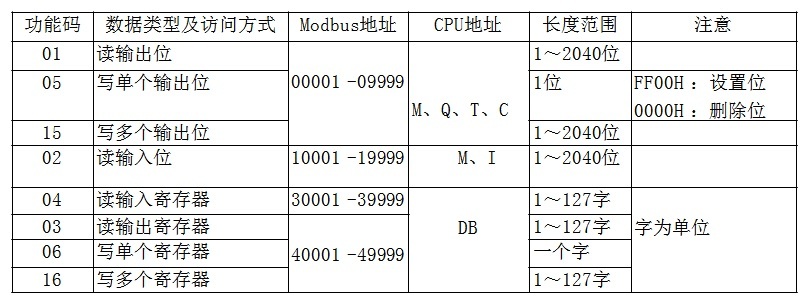
图5 MODBUS 地址对应关系
 注意:在传输消息桢中,用户使用的地址是0为基准,而对应的Modbus地址是1为基准,如FC16功能码时以16进制的0000为起始地址,对应的寄存器是从40001开始。
注意:在传输消息桢中,用户使用的地址是0为基准,而对应的Modbus地址是1为基准,如FC16功能码时以16进制的0000为起始地址,对应的寄存器是从40001开始。
MODBUS RTU 传输模式:消息桢中的每个8位分成2个4位16进制的字符。
每个字符帧格式(11位),如图 6 所示。

图6 字符帧格式
注意:如果无奇偶校验位,停止位是2位。
消息帧格式,如图 7 所示。

- 意大利SELET B01AN10PO 光电传感器
- 意大利SELET B01AN10PCV6 光电传感器
- 意大利SELET B01AN10PCC5 光电传感器
- AECO SIA63-CE PNP NO+NC R
- AECO SIA05-CE NPN NO+NC H R
- AECO SIM-C2 PNP NO 6 POSLC5
- 欢迎询价 西门子 6FX2001-3EB00
- 欢迎询价 西门子 6FX1002-5EA21
- 欢迎询价 西门子 6FX2001-3CC50
- 欢迎询价 西门子 6FX1002-5EA13
- 欢迎询价 西门子 6FX2001-3CB02
- 欢迎询价 西门子 6FX1002-5EA12
- 欢迎询价 西门子 6FX2001-3CB00
- 欢迎询价 西门子 6FX1002-5EA06
- 欢迎询价 西门子 6FX2001-2UK00
